PERCOBAAN 2 KONDISI 5
1. Prosedur[Kembali]
- Rangkai sesuai gambar percobaan dengan inputnya yaitu sensor Soil Moisture dan outputnya yaitu LED RGB dan Motor Stepper
- Buatlah program dengan konfigurasi pin input dan output berdasarkan pada pin GPIO STM32 yang telah dirangkai sebelumnya. Kemudian buatlah program untuk menghasilkan output LED RGB sesuai kondisi yang telah ditentukan
- Run simulation dan lihat perubahan ketika sensor soil moisture mendeteksi kelembapan basah
- Program selesai
A. Hardware
1. STM32

2. Sensor Soil Moisture



6. LED

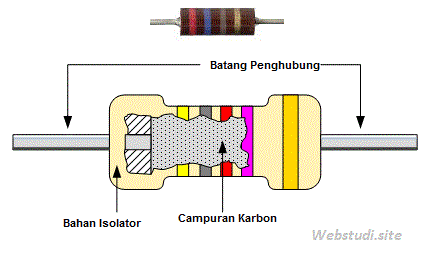
7. Resistor
B. Blok Diagram

3. Rangkaian Simulasi dan Prinsip Kerja[Kembali]
A. Rangkaian Simulasi

B. Prinsip Kerja
Rangkaian ini bekerja dengan sensor soil moisture sebagai input serta LED RGB dan Motor Stepper sebagai output.
Sensor soil moisture jika mendeteksi basah, maka akan menghasilkan output LED RGB akan berwarna biru dan motor stepper akan bergerak
4. Flowchart dan Listing Program[Kembali]

Listing Program
#include "stm32f1xx_hal.h"
#include "stm32f1xx_hal_rcc.h"
// Konfigurasi Pin Stepper
#define STEPPER_PORT GPIOB
#define IN1_PIN GPIO_PIN_8
#define IN2_PIN GPIO_PIN_9
#define IN3_PIN GPIO_PIN_10
#define IN4_PIN GPIO_PIN_11
// Konfigurasi LED RGB
#define LED_PORT GPIOB
#define LED_RED_PIN GPIO_PIN_12
#define LED_GREEN_PIN GPIO_PIN_13
#define LED_BLUE_PIN GPIO_PIN_14
// Urutan langkah stepper
const uint16_t STEP_SEQ_CW[4] = {0x0100, 0x0200, 0x0400, 0x0800};
const uint16_t STEP_SEQ_CCW[4] = {0x0800, 0x0400, 0x0200, 0x0100};
ADC_HandleTypeDef hadc1;
uint8_t current_mode = 0; // 0 = CW, 1 = CCW, 2 = Oscillate
uint8_t direction = 0; // Untuk Oscillate mode
// Prototipe fungsi
void SystemClock_Config(void);
void MX_GPIO_Init(void);
void MX_ADC1_Init(void);
void RunStepper(const uint16_t *sequence, uint8_t speed);
void Error_Handler(void);
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_ADC1_Init();
while (1)
{
// Baca nilai ADC (potensiometer)
HAL_ADC_Start(&hadc1);
if (HAL_ADC_PollForConversion(&hadc1, 10) == HAL_OK)
{
uint16_t adc_val = HAL_ADC_GetValue(&hadc1);
// Tentukan mode berdasarkan ADC
if (adc_val < 1365) {
current_mode = 0;
HAL_GPIO_WritePin(LED_PORT, LED_RED_PIN, GPIO_PIN_SET);
HAL_GPIO_WritePin(LED_PORT, LED_GREEN_PIN | LED_BLUE_PIN, GPIO_PIN_RESET);
}
else if (adc_val < 2730) {
current_mode = 1;
HAL_GPIO_WritePin(LED_PORT, LED_GREEN_PIN, GPIO_PIN_SET);
HAL_GPIO_WritePin(LED_PORT, LED_RED_PIN | LED_BLUE_PIN, GPIO_PIN_RESET);
}
else {
current_mode = 2;
HAL_GPIO_WritePin(LED_PORT, LED_BLUE_PIN, GPIO_PIN_SET);
HAL_GPIO_WritePin(LED_PORT, LED_RED_PIN | LED_GREEN_PIN, GPIO_PIN_RESET);
}
}
// Eksekusi stepper sesuai mode
switch (current_mode)
{
case 0: // CW
RunStepper(STEP_SEQ_CCW, 10);
break;
case 1: // CCW
RunStepper(STEP_SEQ_CW, 10);
break;
case 2: // Oscillate
if (direction == 0)
{
RunStepper(STEP_SEQ_CW, 5);
if ((STEPPER_PORT->ODR & 0x0F00) == STEP_SEQ_CW[3])
direction = 1;
}
else
{
RunStepper(STEP_SEQ_CCW, 5);
if ((STEPPER_PORT->ODR & 0x0F00) == STEP_SEQ_CCW[3])
direction = 0;
}
break;
}
}
}
// Fungsi untuk menjalankan stepper
void RunStepper(const uint16_t *sequence, uint8_t speed)
{
static uint8_t step = 0;
STEPPER_PORT->ODR = (STEPPER_PORT->ODR & 0x00FF) | sequence[step];
step = (step + 1) % 4;
HAL_Delay(speed);
}
// Konfigurasi clock default (HSI)
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK | RCC_CLOCKTYPE_SYSCLK
| RCC_CLOCKTYPE_PCLK1 | RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_HSI;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_0) != HAL_OK)
{
Error_Handler();
}
}
// Inisialisasi GPIO
void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
__HAL_RCC_GPIOB_CLK_ENABLE(); // Aktifkan clock GPIOB
// LED pin output
GPIO_InitStruct.Pin = LED_RED_PIN | LED_GREEN_PIN | LED_BLUE_PIN;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_PULLDOWN;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(LED_PORT, &GPIO_InitStruct);
// Stepper pin output
GPIO_InitStruct.Pin = IN1_PIN | IN2_PIN | IN3_PIN | IN4_PIN;
HAL_GPIO_Init(STEPPER_PORT, &GPIO_InitStruct);
}
// Inisialisasi ADC1 untuk potensiometer
void MX_ADC1_Init(void)
{
ADC_ChannelConfTypeDef sConfig = {0};
hadc1.Instance = ADC1;
hadc1.Init.ScanConvMode = ADC_SCAN_DISABLE;
hadc1.Init.ContinuousConvMode = DISABLE;
hadc1.Init.DiscontinuousConvMode = DISABLE;
hadc1.Init.ExternalTrigConv = ADC_SOFTWARE_START;
hadc1.Init.DataAlign = ADC_DATAALIGN_RIGHT;
hadc1.Init.NbrOfConversion = 1;
if (HAL_ADC_Init(&hadc1) != HAL_OK)
{
Error_Handler();
}
sConfig.Channel = ADC_CHANNEL_0;
sConfig.Rank = ADC_REGULAR_RANK_1;
sConfig.SamplingTime = ADC_SAMPLETIME_71CYCLES_5;
if (HAL_ADC_ConfigChannel(&hadc1, &sConfig) != HAL_OK)
{
Error_Handler();
}
}
// Error Handler
void Error_Handler(void)
{
while (1) {}
}
Tidak ada komentar:
Posting Komentar